'Grid-Friendly' Utility-Scale PV Plants

A typical PV solar generation plant is composed of multiple individual “generators” connected to the electrical network via power electronics (inverters). Through sophisticated control functions, the PV plant can contribute actively to grid stability and reliability and operate effectively in the grid.
A task force under the aegis of the North American Electrical Reliability Corporation (NERC) has made several recommendations on specific requirements that such variable generation plants must meet in order to provide their share of grid support. These recommendations address grid requirements such as voltage control and regulation, voltage and frequency fault ride-through, reactive and real power control and frequency response criteria in the context of the technical characteristics and physical capabilities of variable-generation equipment.
Below, we describe our concept of a “grid-friendly” PV plant that incorporates these recommendations. The “grid-friendly” PV plant also includes the ability to ride through specific low and high voltages or low- and high-frequency ranges. A number of plants with these features are in operation and field data from First Solar-developed utilityscale PV plants are used to illustrate the concepts.
Power Plant Controller Architecture
A key component is the plant-level controller. It is designed to regulate real and reactive power output from the PV plant, such that it behaves as a single large generator. While the plant is composed of individual small generators (or, more specifically, inverters), the function of the plant controller is to coordinate the power output in order to provide typical large power plant features such as active power control and voltage regulation (through reactive power regulation).
The plant controller provides the following plant-level control functions:
- Dynamic voltage and/or power factor regulation of the solar plant at the point of interconnection (POI)
- Real power output curtailment of the solar plant when required, so that it does not exceed an operator-specified limit
- Ramp-rate controls to ensure that the plant output does not ramp up or down faster than a specified ramp-rate limit, to the extent possible
- Frequency control to lower plant output in case of over-frequency situation or increase plant output (if possible) in case of under-frequency
- Start-up and shut-down control
The plant controller implements plant-level logic and closed-loop control schemes with real-time commands to the inverters to achieve fast and reliable regulation. Typically there is one controller per plant that is controlling the output at a single high-voltage bus (referred to as POI). The commands to the plant controller can be provided through the SCADA HMI or even through other interface equipment, such as a substation remote terminal unit (RTU).
Figure 2 illustrates a block-diagram overview of the control system and its interfaces to other devices in the plant. The power plant controller monitors system-level measurements and determines the desired operating conditions of various plant devices to meet the specified targets. It manages capacitor banks and/or reactor banks, if present. It manages all the inverters in the plant, ensuring that they are producing the real and reactive power necessary to meet the desired settings at the POI.

When the plant operator sends an active power curtailment command, the controller calculates and distributes active power curtailment to individual inverters. In general, the inverters can be throttled back only to a certain specified level of active power and not any lower without causing the DC voltage to rise beyond its operating range. Therefore, the plant controller dynamically stops and starts inverters as needed to manage the specified active power output limit. It also uses the active power management function to ensure that the plant output does not exceed the desired ramp rates, to the extent possible. It cannot, however, always accommodate rapid reduction in irradiance due to cloud cover.
Dynamic Voltage Regulation Modes
Through the SCADA HMI, the plant control system can be set to operate in one of the three modes of automatic voltage regulation (AVR): voltage-regulation, power-factor regulation or reactive-power control. The three AVR modes are illustrated in the SCADA HMI screen shown in Figure 3 below. Note that the plant can operate in only one of the three operating modes at any time.
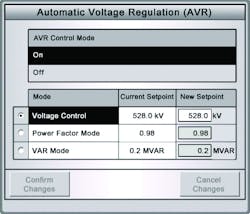
In the voltage-regulation mode, the controller maintains the specified voltage set point at the POI by regulating the reactive power that is produced by the inverters as well as other devices such as capacitor banks. In the power-factor regulation mode, the controller maintains the specified power factor. The operation of the controller is illustrated in Figure 4 below, which shows field data from a PV plant producing about 212 MW of active power at that time.
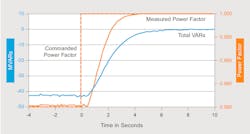
The figure illustrates the response of the plant when the power factor set point is changed from 0.98 to 1.0. The controller commands the inverters to change their reactive power output to meet the new power factor set point, using a closed-loop control mechanism. The figure illustrates that the inverters respond very rapidly. Within a few seconds (< 4 s) the new set point is achieved in a closed-loop control mode. More specifically, the rise time to reach 90 percent of steady-state value shown above is about 3.2 s.
Active Power Management
Through the SCADA HMI, the controller can also be set to control the active power output of the plant. When the control system detects that the active power at POI exceeds the specified set point, it calculates and sends the commands for each inverter individually to lower its output to achieve the desired set point, using a closed-loop control mechanism. In some cases the plant controller will turn off certain inverters to achieve this desired set point, since output of each inverter cannot be lowered below a certain threshold without causing a high DC voltage operating condition.
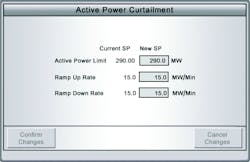
Figure 6 below illustrates field data from a PV plant operating at around 90 MW power. The curtailment limit is initially changed from 100 MW to 82.5 MW. The plant controller turns down the inverters (and turns off some of them if required) to achieve the new set point. Note that the turndown of power is gradual to meet the specified ramp-rate limit.
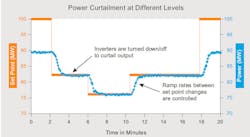
The curtailment limit is reduced again to around 75 MW, and the controller responds as expected. When the limit is raised, the controller adjusts the output of the inverters to increase the total plant output. Finally, when the limit is raised to 100 MW, the plant is no longer curtailed since the plant is producing less than the limit.
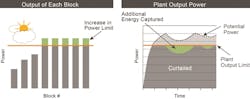
In all the control actions, the controller’s command to each inverter is unique, given the specific conditions each inverter is experiencing. In the case of curtailment due to cloud passage, where the plant has additional generating capacity but is restrained to a specified limit and curtailment is limited to part of the plant, the controller can minimize the impact of cloud cover by increasing the output of other inverters that are not impacted. This will result in increased energy yield as illustrated in Figure 7.
An illustration of additional function related to active power management is shown in Figure 8 below, which shows the reaction of the plant when it is shut down and started up. In this example, the field data illustrates when one block (30 MW) that is under control of the plant controller is commanded to shut down, the active power management function reduces plant output while maintaining the required ramp rate. As mentioned earlier, some inverters are turned down while others are shut down. Note that the control is quite effective even with moderately varying irradiance conditions.
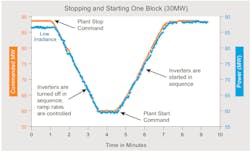
The above figure also illustrates the “plant start” command that results in the controller gradually increasing the plant output by adjusting the inverters’ output and turning on the inverters in sequence.
Frequency Droop Control
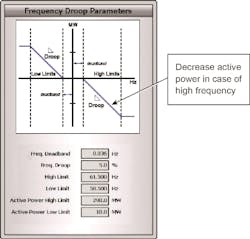
The control system also provides frequency droop control to handle unusual grid situations1. For example, in case of above-normal frequency, the controller will reduce the active power of the plant as illustrated in Figure 9 below. If the plant is under curtailment, the power can also be increased if the below-normal frequency is detected. Note that all the parameters illustrated in the figure are configurable and are shown here for illustrative purposes only.
Fault Ride-Through Capability
The ability to ride through specific low and high voltages or low- and high-frequency ranges is being designed effectively into all modern variable generators. Most utilityscale inverters have this capability. With proper design practices, the PV plant is engineered to ensure that all components besides inverters also have the ability to ride through short-term grid events.
Grid-Friendly PV Plants Are Operational Today
We have described a utility-scale “grid-friendly” PV power plant that incorporates advanced capabilities essential to supporting grid stability and reliability. It includes features such as voltage regulation, active power controls, ramp-rate controls, fault ride through, and frequency control. It also has the ability to minimize the impact of cloud cover. These capabilities provide the intrinsic benefits of reliable plant operation in the grid, which in turn results in additional plant yield and potential additional revenue. These “grid-friendly” capabilities, essential for increased penetration of large-scale PV plants into the electric grid, are operational and available today for utility-scale PV plants ranging from several megawatts to several hundred megawatts. These advanced plant features enable solar PV plants to behave more like conventional generators and actively contribute to grid reliability and stability, providing significant value to utilities and grid operators.

{kind=link}
{kind=link}
For a printable pdf version, click here.
Mahesh Morjaria, VP, Product Management, First Solar, leads the development of First Solar’s grid integration capability for utility scale PV plants. His academic credits include B.Tech from IIT Bombay and Ph.D. from Cornell University in USA.
Dmitry Anichkov, Principal Engineer, Plant Controls, First Solar, is responsible for the development of the First Solar Real-Time Plant Control System. Dmitriy holds a MS degree from St. Petersburg Polytechnic.